
Los ámbitos de aplicación habituales de los robots industriales se concentran principalmente en la soldadura, la pulverización y la manipulación. ¿Es útil en el campo del plegado? Por supuesto que sí. Entre 40% y 50% de las máquinas curvadoras de los talleres de transformación de chapa metálica están equipadas con sistemas automáticos de curvado robotizados. Hoy voy a explicarles cómo se utiliza en el plegado.
La unidad de procesamiento flexible de plegado de chapa CNC con robots como componentes centrales de ejecución es una combinación de equipos altamente automatizada con las ventajas de alta eficiencia, alta calidad y alta flexibilidad. En la unidad de procesamiento flexible de plegado, la elección de una combinación adecuada de componentes puede proporcionar un mejor soporte para la eficiencia y flexibilidad de procesamiento. La precisión de doblado depende de la precisión de la propia máquina dobladora, la precisión de posicionamiento del robot y el control coordinado del robot y la máquina dobladora; la dificultad del control coordinado radica en la coincidencia de velocidad del robot y la máquina dobladora, así como en la trayectoria de marcha del robot que soporta la pieza de trabajo; un efecto de seguimiento deficiente afectará seriamente al efecto de formación del ángulo de doblado y a la planitud de la superficie de la placa, afectando así a la calidad del producto acabado.


Función de salto de rana
Como se muestra en la figura, la unidad de procesamiento de plegado estándar se basa en el robot y la plegadora, y la pinza, la mesa de carga, la mesa de descarga, el banco de trabajo de posicionamiento, el bastidor de giro, el dispositivo de cambio de mano y varios sensores de detección son componentes auxiliares.
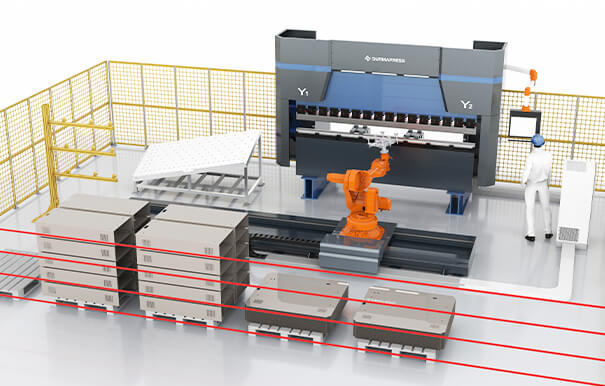

The gripper is the “hand” of the robot that takes the place of manual labor to pick up and place the workpiece. The gripper of the bending robot is generally composed of multiple suction cups installed on a metal frame. The loading and unloading tables usually use stacking pallets, and there are also conveyor belts or rollers as units to transport raw materials and transfer finished products. Oily sheets are prone to adhesion, resulting in multiple sheets being picked up at a time. Various sheet separation devices (such as magnetic sheet separation devices) and detection sensors can be installed next to the loading table to ensure that the sheet being grabbed is a single sheet. The positioning workbench is an inclined platform with a rib, and slightly raised balls are distributed on the table. The robot transfers the steel plate to the positioning table, and the plate slides freely to the rib under gravity. Since the position of the positioning table and the rib are fixed, when the robot grabs the plate again, the position of the plate and the gripper is relatively accurately fixed, providing a reference for the next step of bending. The flip frame is a fixed frame of a gripping device. When the robot needs to change the position to pick up the workpiece, the workpiece can be placed on the flip frame to fix it, and the robot can grab the workpiece again at the new position. In some special occasions, the bending machine mold can also be used to clamp the workpiece and change the grasping position.
Flujo de trabajo de la unidad de plegado
Como se muestra en la figura, el trabajo de la unidad de procesamiento de plegado se divide principalmente en seis procesos: carga, recogida, centrado, volteo, plegado y apilado.
Carga: Coloque manualmente toda la pila de hojas a procesar en la mesa de carga, e instale un interruptor de detección de hojas en la mesa de carga para evitar que el robot coja el palé una vez procesadas todas las hojas. Recogida: El robot se desplaza hasta la mesa de carga y detecta la altura de la hoja mediante el sensor ultrasónico instalado en la pinza. En función de los datos de detección, se desplaza automáticamente a la posición adecuada para agarrar la hoja. Después de agarrar la hoja, el grosor de la hoja se mide mediante el dispositivo de medición de grosor para evitar agarrar varias hojas a la vez, causando fallos de procesamiento. Una vez superada la medición del grosor, está lista para el centrado. Centrado: El robot se desplaza a la mesa de posicionamiento, coloca la chapa en la mesa de posicionamiento para un posicionamiento preciso y vuelve a agarrar la chapa una vez finalizado el posicionamiento, lista para el plegado.

Volteo: Determine si debe utilizar un bastidor abatible en función de los requisitos del proceso. Si es necesario, mueva el robot a la posición del marco abatible y coloque la hoja en el marco abatible. El robot suelta la hoja y la evita. Una vez completado el volteo, agarra la chapa. Plegado: El robot se desplaza a la posición de la plegadora y coloca la chapa plana sobre la matriz inferior de la plegadora. El sensor de dedos trasero de la plegadora la posiciona con precisión. Tras el posicionamiento, el robot envía una señal de plegado a la plegadora y coopera con ella para completar la acción de plegado (como se muestra en la figura). Determina si necesita doblar de nuevo para decidir si realiza un doblado continuo. El curvado es un eslabón clave. La dificultad técnica del plegado reside en la acción coordinada del robot y la plegadora, es decir, el seguimiento del plegado. Cuando el robot sujeta o apoya la chapa para doblarla, la chapa se deforma, y el robot necesita seguir la chapa para realizar un movimiento de arco según un algoritmo de trayectoria específico, y mantener siempre una posición relativamente fija con la chapa.

Paletización: El robot se desplaza a la mesa de descarga. Debido a la diferencia en la formación de la pieza de trabajo, hay una variedad de acciones de proceso de paletizado (como se muestra en la figura), tales como paletizado de matriz convencional, paletizado cruzado de capa simple y doble, paletizado de enclavamiento positivo y negativo, etc.
Aspectos técnicos
En la actualidad, tanto si se trata de un robot estándar general de seis ejes como de un robot de plegado especial con una envergadura o forma de brazo optimizada para el proceso de plegado, necesita el apoyo del algoritmo de seguimiento del plegado, y son muy pocos los casos en los que no sigue el plegado. Sin un buen efecto de seguimiento, la fijación o la pinza de ventosa tirarán de la pieza de trabajo debido a una trayectoria de seguimiento deficiente, formando arrugas en la placa y afectando a la calidad del conformado. Establecer un modelo preciso de movimiento de seguimiento de plegado del robot es útil para establecer un buen algoritmo de trayectoria de seguimiento, para obtener un excelente efecto de seguimiento.
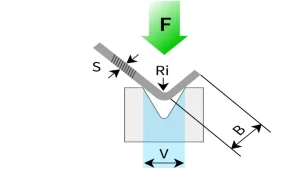
La siguiente figura es un modelo de movimiento de flexión. Entre ellos, los parámetros se expresan como sigue: 1) Radio de arco de la matriz superior: R/mm. 2) Radio del arco de la matriz inferior: r/mm. 3) Apertura de la matriz inferior: V/mm. 4) Ángulo de la matriz inferior: ∠b/grado. 5) Espesor de la pieza: T/mm. 6) Espesor de la capa neutra a la superficie superior de la pieza: λ/mm. 7) Ángulo de flexión de la pieza de trabajo ∠a/degree. 8) Cantidad de movimiento descendente de la dobladora desde el punto de sujeción: S/mm.
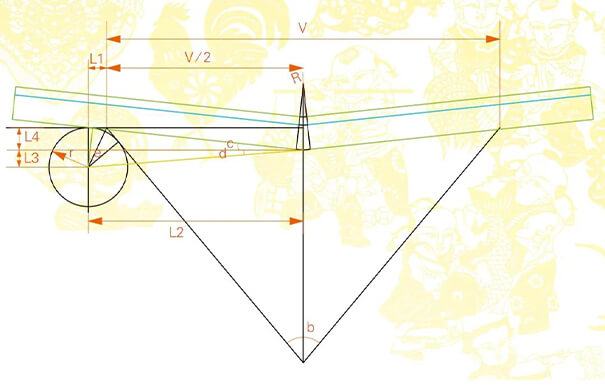
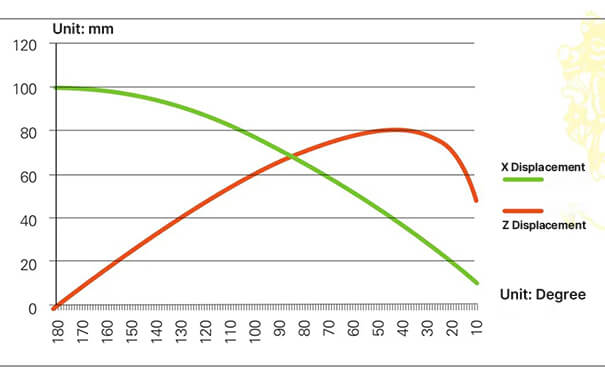
Según el modelo de movimiento, se puede calcular la relación entre el ángulo de flexión y la cantidad de flexión: S={r×tan[(45°-∠b/4)+V/2]×sin(90°-∠a/2)-(r+R+T)}/cos(90°-∠a/2)+(r+R+T) Según diferentes parámetros mecánicos, combinados con la fórmula de la relación entre el ángulo de flexión y la cantidad de flexión, se puede obtener la curva de trayectoria del cambio de desplazamiento en las direcciones X y Z de 180° a 10°. La información del molde de flexión y la pieza de trabajo se muestran en la Tabla 1, y la curva de trayectoria se muestra en la figura siguiente.

Conclusión
Con el continuo desarrollo de la industria de fabricación de chapa metálica, el plegado robotizado tiene una perspectiva de aplicación más amplia. En comparación con el desarrollo de robots de plegado especiales, el coste de desarrollo del algoritmo del modelo de seguimiento de plegado adecuado para robots generales de seis ejes y aplicado a robots generales es menor. En combinación con los robots y otros equipos auxiliares de las marcas más excelentes de la industria, se puede promover rápidamente la aplicación del plegado robotizado.

Quiénes somos
Durmapress specializes in designing, manufacturing and selling various metal processing equipment, including bending machines, shears, punches, laser cutting machines, etc. The company was founded in 2000. With years of experience and technology accumulation. DurmaPress has become one of the well-known brands in China’s metal processing machinery industry.


Póngase en contacto con nosotros
Entradas recientes

Categorías
Síguenos
Nuevo vídeo semanal
Más información
Si tiene alguna información sobre nuestros productos, póngase en contacto con nosotros y le responderemos en 24 horas.
