The common application areas of industrial robots are mainly concentrated in welding, spraying, and handling. Is it useful in the field of bending? Of course it is useful. 40% to 50% of the bending machines in sheet metal processing workshops are equipped with robot automatic bending systems. Today I will take you to fully understand how it is used in bending.
The CNC sheet metal bending flexible processing unit with robots as core execution components is a highly automated equipment combination with the advantages of high efficiency, high quality and high flexibility. In the bending flexible processing unit, choosing a suitable combination of components can provide better support for processing efficiency and flexibility. The bending accuracy depends on the accuracy of the bending machine itself, the positioning accuracy of the robot, and the coordinated control of the robot and the bending machine; the difficulty of coordinated control lies in the speed matching of the robot and the bending machine, as well as the running trajectory of the robot supporting the workpiece; poor following effect will seriously affect the bending angle forming effect and the flatness of the plate surface, thereby affecting the quality of the finished product.
Frog jump function
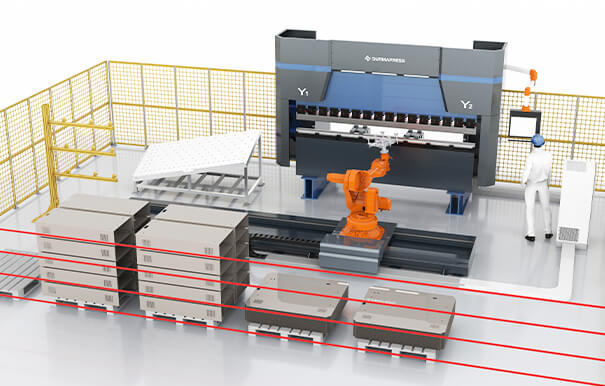
As shown in the figure, the standard bending processing unit is based on the robot and the bending machine, and the gripper, loading table, unloading table, positioning workbench, turning frame, hand changing device, and various detection sensors are auxiliary components.
The gripper is the "hand" of the robot that takes the place of manual labor to pick up and place the workpiece. The gripper of the bending robot is generally composed of multiple suction cups installed on a metal frame. The loading and unloading tables usually use stacking pallets, and there are also conveyor belts or rollers as units to transport raw materials and transfer finished products. Oily sheets are prone to adhesion, resulting in multiple sheets being picked up at a time. Various sheet separation devices (such as magnetic sheet separation devices) and detection sensors can be installed next to the loading table to ensure that the sheet being grabbed is a single sheet. The positioning workbench is an inclined platform with a rib, and slightly raised balls are distributed on the table. The robot transfers the steel plate to the positioning table, and the plate slides freely to the rib under gravity. Since the position of the positioning table and the rib are fixed, when the robot grabs the plate again, the position of the plate and the gripper is relatively accurately fixed, providing a reference for the next step of bending. The flip frame is a fixed frame of a gripping device. When the robot needs to change the position to pick up the workpiece, the workpiece can be placed on the flip frame to fix it, and the robot can grab the workpiece again at the new position. In some special occasions, the bending machine mold can also be used to clamp the workpiece and change the grasping position.
Bending unit workflow
As shown in the figure, the work of the bending processing unit is mainly divided into six processes: loading, picking, centering, turning over, bending and stacking.
Loading: Manually place the entire stack of sheets to be processed on the loading table, and install a sheet detection switch on the loading table to prevent the robot from grabbing the pallet after all the sheets have been processed. Picking: The robot moves to the loading table, and detects the height of the sheet through the ultrasonic sensor installed on the gripper. Based on the detection data, it automatically moves to the appropriate position to grab the sheet. After the sheet is grabbed, the thickness of the sheet is measured by the thickness measuring device to avoid grabbing multiple sheets at a time, causing processing failures. After the thickness measurement passes, it is ready for centering. Centering: The robot moves to the positioning table, places the sheet on the positioning table for precise positioning, and grabs the sheet again after positioning is completed, ready for bending.
Flipping: Determine whether to use a flipping frame based on process requirements. If necessary, move the robot to the flipping frame position and place the sheet on the flipping frame. The robot releases the sheet and avoids it. After flipping is completed, it grabs the sheet. Bending: The robot moves to the bending machine position and places the sheet flat on the lower die of the bending machine. It is precisely positioned by the rear finger sensor of the bending machine. After positioning, the robot sends a bending signal to the bending machine and cooperates with the bending machine to complete the bending action (as shown in the figure). It determines whether it needs to bend again to decide whether to perform continuous bending. Bending is a key link. The technical difficulty of bending lies in the coordinated action of the robot and the bending machine, that is, bending following. When the robot clamps or supports the sheet for bending, the sheet is deformed, and the robot needs to follow the sheet to make an arc movement according to a specific trajectory algorithm, and always maintain a relatively fixed position with the sheet.
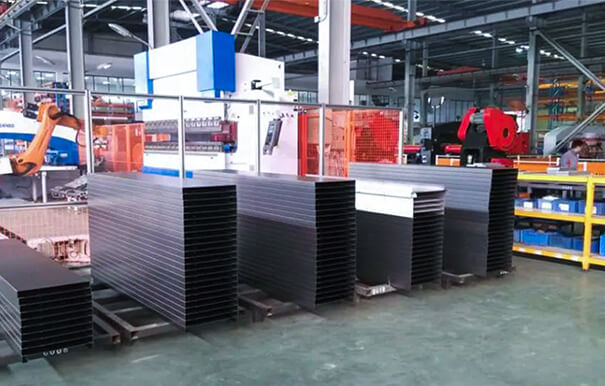
Palletizing: The robot moves to the unloading table. Due to the difference in the forming of the workpiece, there are a variety of palletizing process actions (as shown in the figure), such as conventional matrix palletizing, single and double layer cross palletizing, positive and negative interlocking palletizing, etc.
Technical points
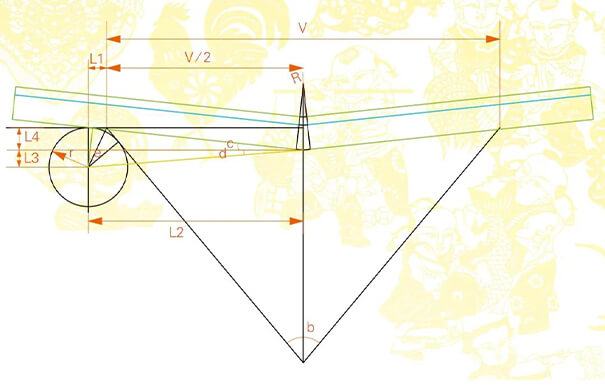
At present, whether it is a general standard six-axis robot or a special bending robot with optimized arm span or shape for bending process, it needs the support of bending following algorithm, and there are very few cases that do not follow bending. Without a good following effect, the fixture or suction cup gripper will pull the workpiece due to poor following trajectory, forming wrinkles on the plate and affecting the forming quality. Establishing an accurate robot bending following motion model is helpful to establish a good following trajectory algorithm, so as to obtain excellent following effect. The following figure is a bending motion model. Among them, the parameters are expressed as follows: 1) Upper die arc radius: R/mm. 2) Lower die arc radius: r/mm. 3) Lower die opening: V/mm. 4) Lower die angle: ∠b/degree. 5) Workpiece thickness: T/mm. 6) Neutral layer to workpiece upper surface thickness: λ/mm. 7) Workpiece bending angle ∠a/degree. 8) The amount of downward movement of the bending machine from the clamping point: S/mm.
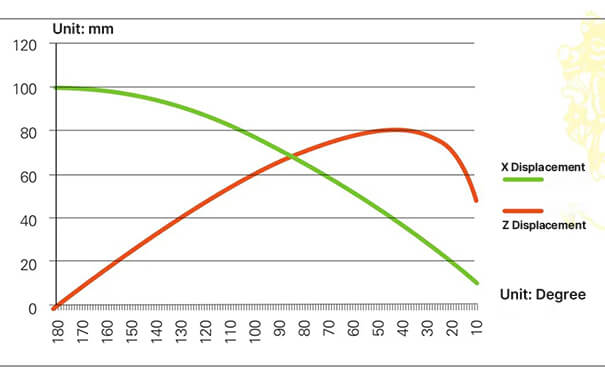
According to the motion model, the relationship between the bending angle and the amount of bending can be calculated: S={r×tan[(45°-∠b/4)+V/2]×sin(90°-∠a/2)-(r+R+T)}/cos(90°-∠a/2)+(r+R+T) According to different mechanical parameters, combined with the formula of the relationship between the bending angle and the amount of bending, the trajectory curve of the displacement change in the X and Z directions from 180° to 10° can be obtained. The bending mold and workpiece information are shown in Table 1, and the trajectory curve is shown in the figure below.
Conclusion
With the continuous development of sheet metal manufacturing industry, robot bending has a broader application prospect. Compared with the development of special bending robots, the development cost of the bending follow-up model algorithm suitable for general six-axis robots and applied to general robots is lower. In combination with the robots and other auxiliary hardware of most excellent brands in the industry, the application of robot bending can be rapidly promoted.
About Us
Durmapress specializes in designing, manufacturing and selling various metal processing equipment, including bending machines, shears, punches, laser cutting machines, etc. The company was founded in 2000. With years of experience and technology accumulation. DurmaPress has become one of the well-known brands in China's metal processing machinery industry.